
с перечислением всех отображаемых объектов:
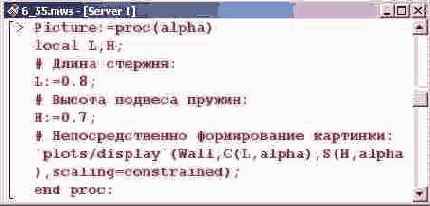
Картинка формируется процедурой 'plots/display'() с перечислением всех отображаемых объектов: трех стенок (переменная Wall), стержня и шарика (формируются командой С(L,alpha)), а также двух пружин (команда S(H,alpha)). Кроме того, чтобы масштабы по горизонтали и вертикали совпадали, указано значение опции scaling=constrained.
Теперь можно посмотреть, как система выглядит в состоянии равновесия (когда угол отклонения стержня равен 0).
После этого приступаем непосредственно к решению задачи. Заметим, что, поскольку в системе не действуют диссипативные силы, полная энергия системы не меняется. Полная энергия системы состоит из:
- а)кинетической энергии шарика;
- б) потенциальной энергии деформации пружин;
- в) потенциальной энергии шарика в гравитационном поле.
Энергию системы определим как оператор. В частности, оператор кинетической энергии шарика, зависящий от функции alpha (эта функция задает эволюцию системы во времени), действует на параметр t следующим образом.